
3D Geospatial Techniques and Tools
Researchers are developing code and workflows to fuse multi-sensor derived point cloud (3D) data into a structure that provides for both the rigorous preservation of all attributes (e.g band values, image registration, etc) and expands analytical and user value in Phase 3 exploitation. An example of Phase 3 exploitation would be illumination conditions. For a given scene how a surface looks under different illumination conditions varies, but only one such set of conditions are realizable at a single instant. For Phase 3 exploitation, such as rapidly rendering different illuminations conditions, voxelization of pointcloud data, flexible spatiotemporal databases and web-based rendering provides a promising workflow.

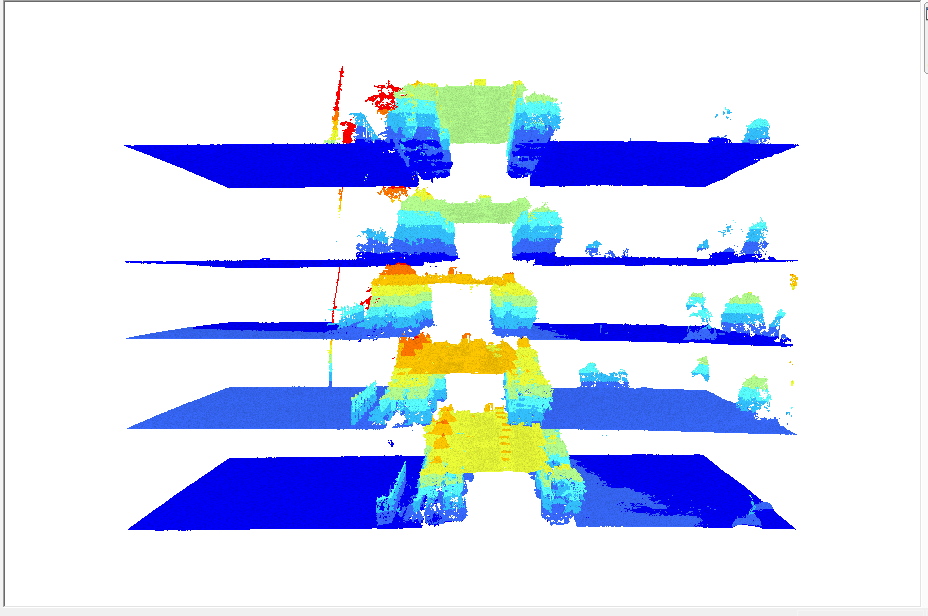
UAS-derived 3D point clouds (top) are converted to LAS and “stacked” temporally to perform 3D change detection (bottom)